park逆变换——闭环之后开始控制的第一步
- 白皮书上公式如下:

有很多点需要作解释:- 为什么使用的是电压而不是电流?
因为park逆变换的作用是: 将PI控制器输出的参考电压从dq坐标系搬到αβ坐标系上;
进一步提问: PI控制器的作用是什么?
PI控制器接受的输入是需要的dq轴电流和当前dq轴电流的误差(Error), 利用PI控制得出下一步需要控制的三相线的电压, 输出参考电压. 这是一个闭环控制过程.
进一步提问: 如何得到当前dq轴电流?
当前的dq轴电流是通过电流采样得到三相电流, 再经过之前描述的clark变换和park变换得到的.
综上所述, 经过PI控制器后, 现在我们得到的是下一步需要控制的电压. 而且从硬件角度来讲, 三相逆变器只能控制电压. - 参考电压是什么意思?
“参考”的意思是, 经过公式计算, 下一步需要控制到这一个值, 但是由于实际控制过程中的各种噪声以及对电机建模不准确, 并不可能完全达到控制目标, 所以称之为”参考”. - dq坐标系下, 电压矢量与电流矢量的关系是什么?
电机是一个复杂的系统, 考虑到电机内部电阻, dq轴电感, 磁链, 以及当前速度, 电流与电压的关系可建模如下:
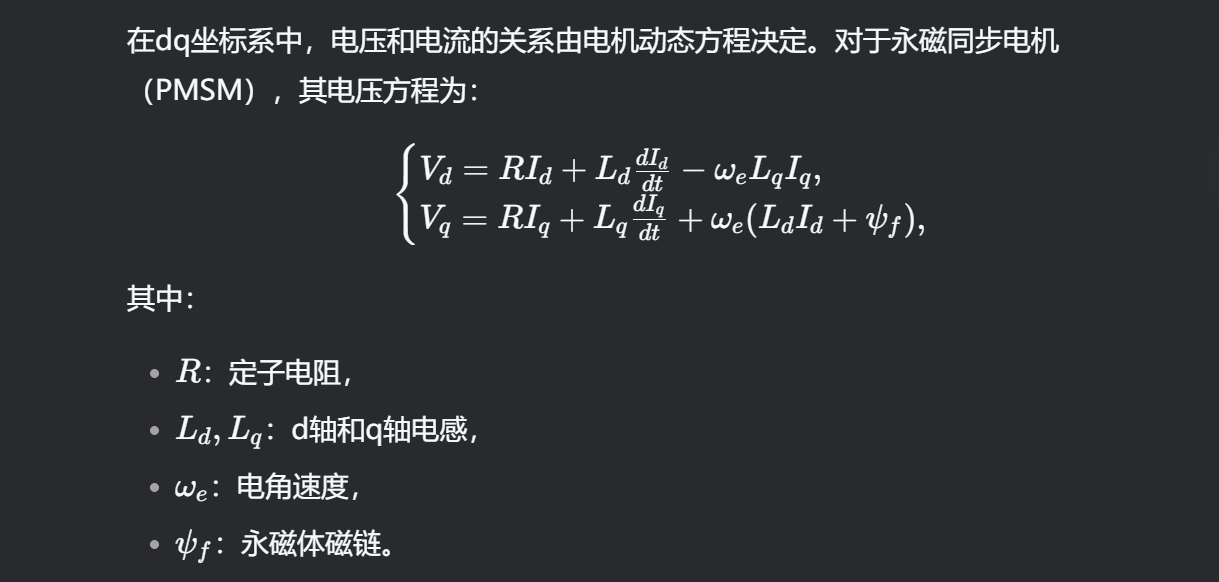
由此可知, 要对一个电机实现准确的foc控制,我们需要通过某种方法得知电机本身的参数:电阻、q/d轴电感、永磁体磁链; 以及电机当前旋转的电角速度.
- 为什么使用的是电压而不是电流?
- 白皮书上公式如下:
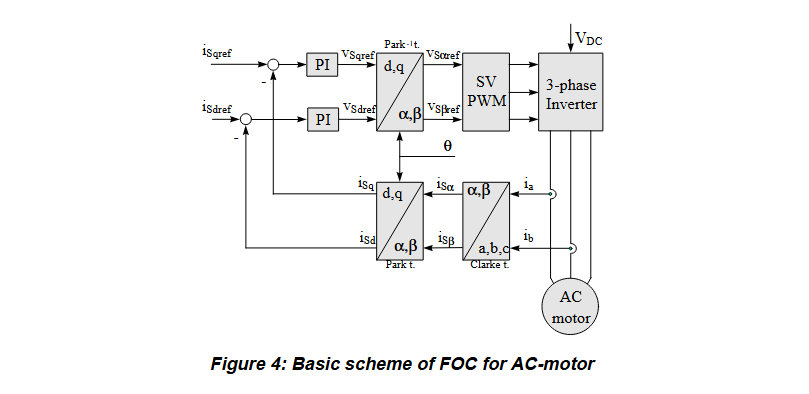
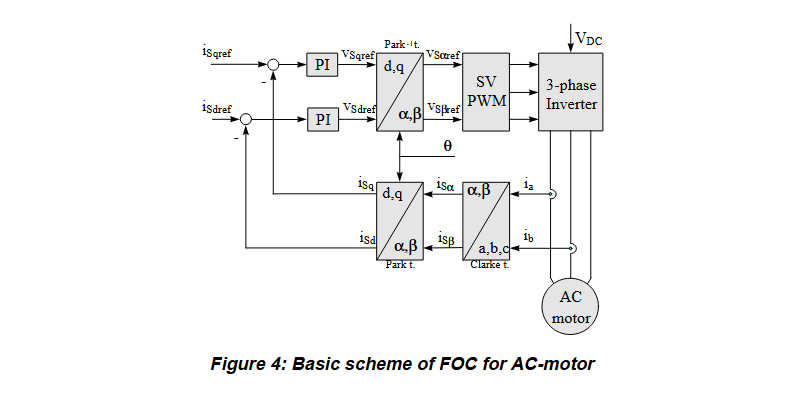
完整foc控制逻辑:
- 我们已经完成了部分数学推导, 现在我们还欠缺的是:
- PI控制器中具体如何运算
- 电流采样的原理和计算
- SVPWM的原理和计算
- 三相逆变器的原理
- 如前所述, 这是一个闭环控制的过程.
- 我们已经完成了部分数学推导, 现在我们还欠缺的是:
PI控制器:
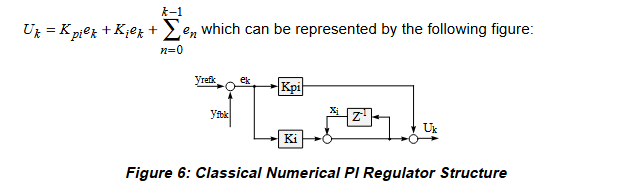
- 其实没那么高大上, 就是比例积分控制器. 白皮书中框图如下:
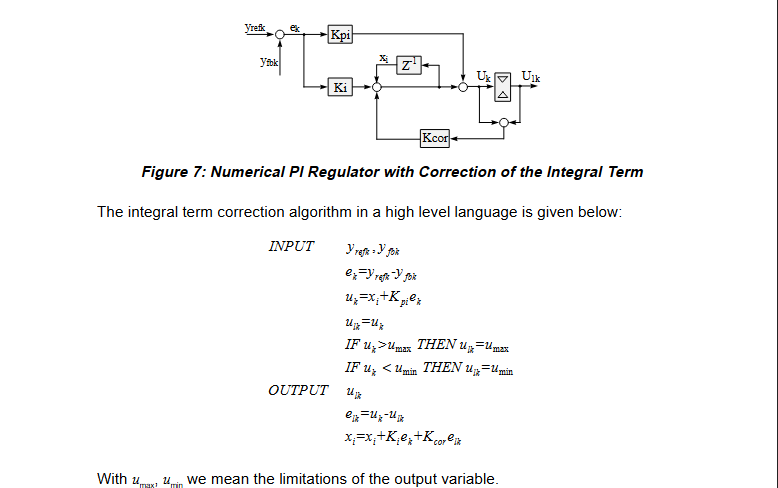
- 有改进版本, 也就是加了输出限幅, 以及超调的补偿措施:
- PI控制器最优的Kp和Ki可以通过分析系统传递函数来得到, 这一部分需要我学习自动控制原理和现代控制理论之后才能有更好的理解.
- 其实没那么高大上, 就是比例积分控制器. 白皮书中框图如下:
FOC与SVPWM学习4
分类:
日期:2025-03-19 16:39:07
目录
上一篇: 对傅里叶变换和级数的全新理解
下一篇 FOC与SVPWM学习3