什么是相位超前与滞后? 如何产生?
- 回忆bode plot中的内容, 原点处的零点引入90°的相位移动, 而且是+90°; 原点处的极点引入-90°的相位移动. 根据左加右减, 正的相位移动是向左移动图像, 称为相位超前(lead), 负的相位移动是向右移动图像, 称为相位滞后(lag).
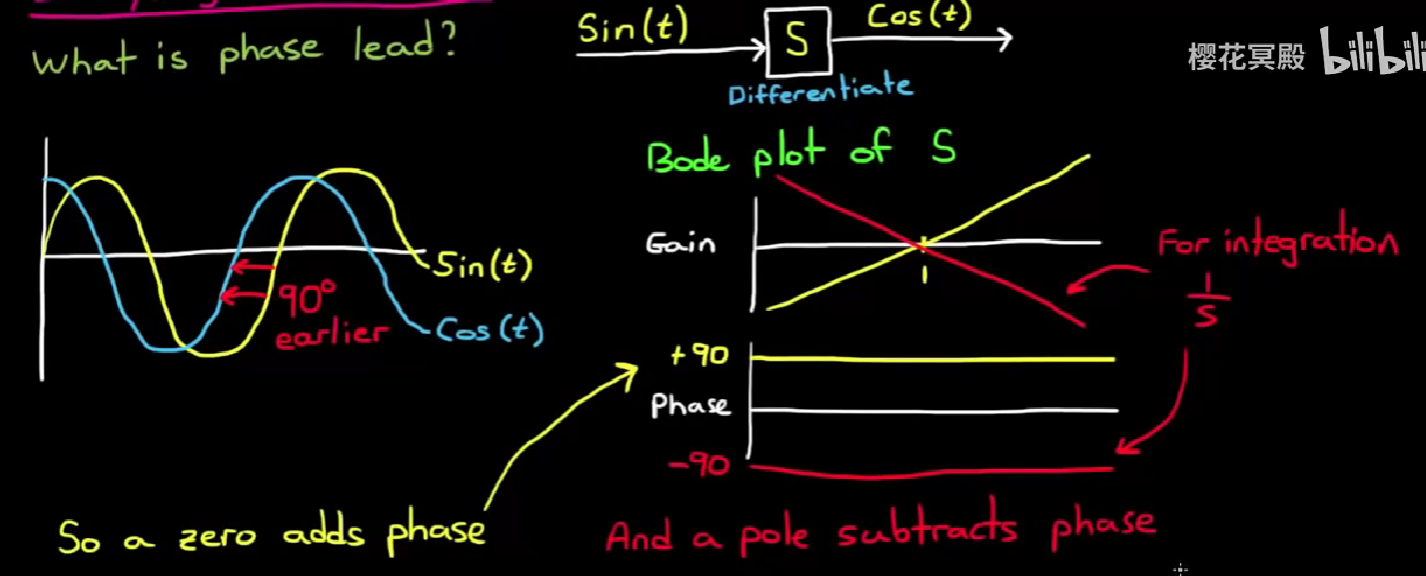
- 然而单独的微分器和积分器不构成相位超前/滞后滤波器, 因为我们希望这种滤波器能实现对任意频率成分进行任意相位移动, 这就需要一个零点和一个极点相互配合, 通过摆在不同的位置拼凑出作用频域和作用效果.
通过bode plot理解超前与滞后滤波器
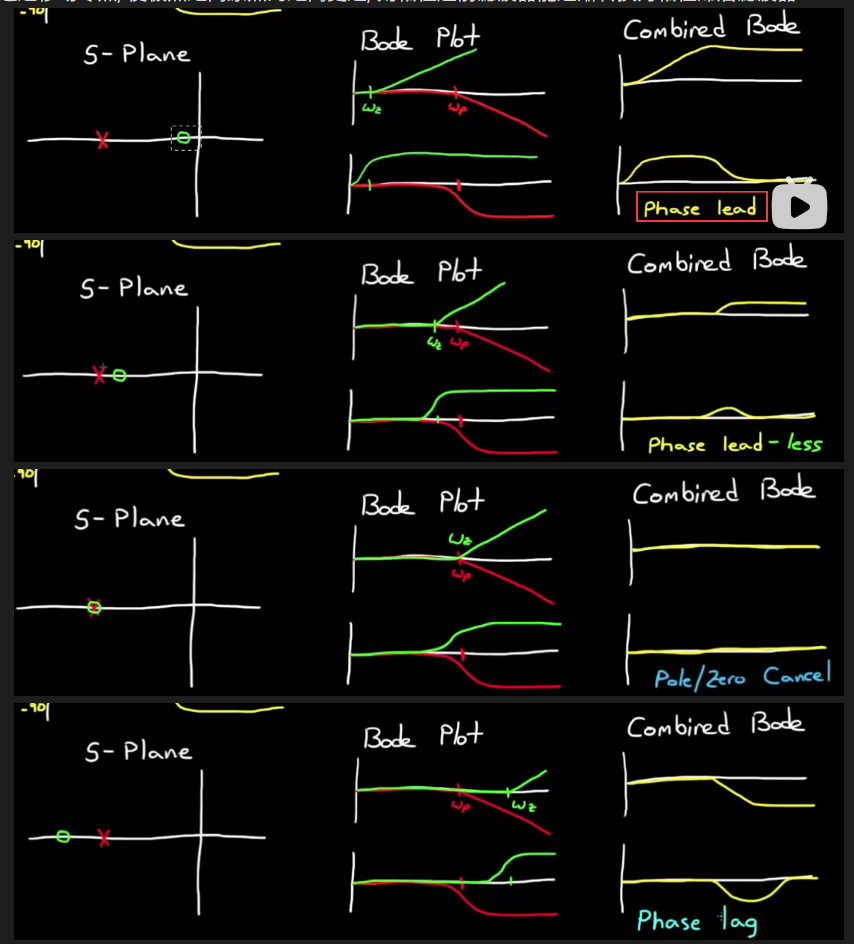
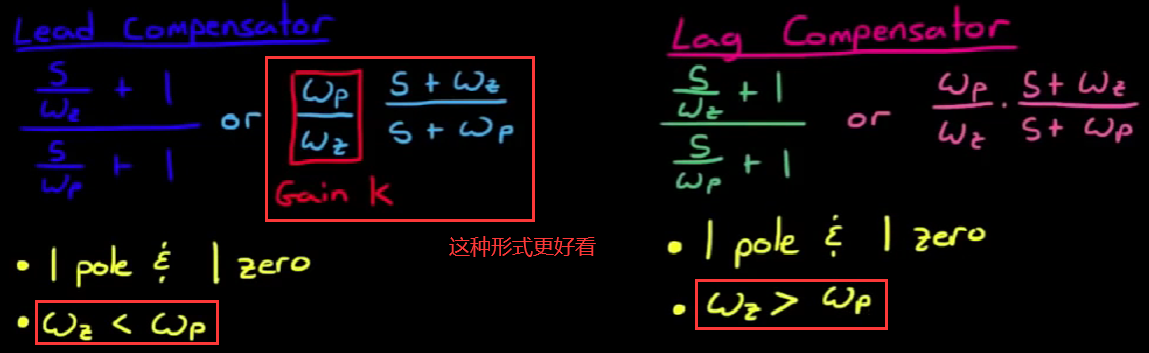
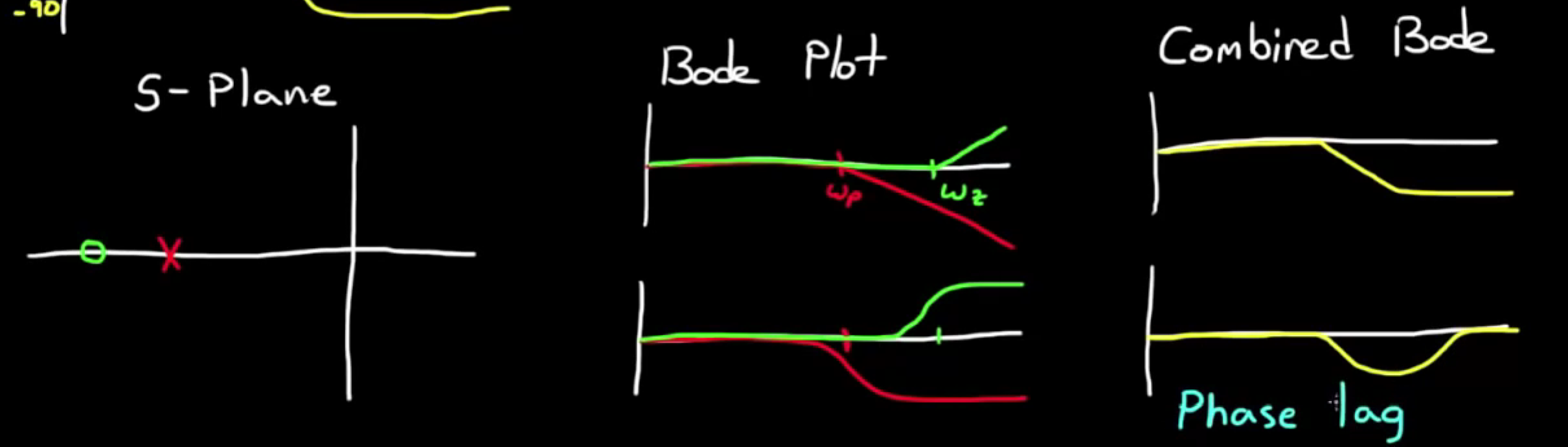
- 超前与滞后滤波器的形式十分相似, 都包含一个在实轴上的极点和一个在实轴上的零点, 唯一的区别是, 相位超前滤波器的零点距离原点更近, 相位滞后滤波器的极点距离原点更近. 我们似乎窥探到一个规律: 离原点更近的点主导了滤波器的性质.
- 先给出滤波器的传递函数:
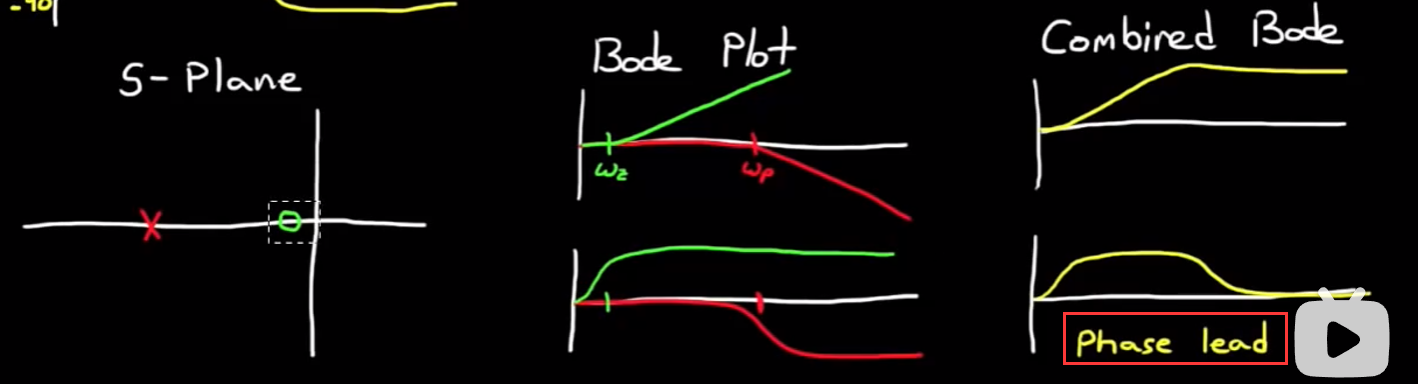
- 画出相位超前滤波器bode plot如下:
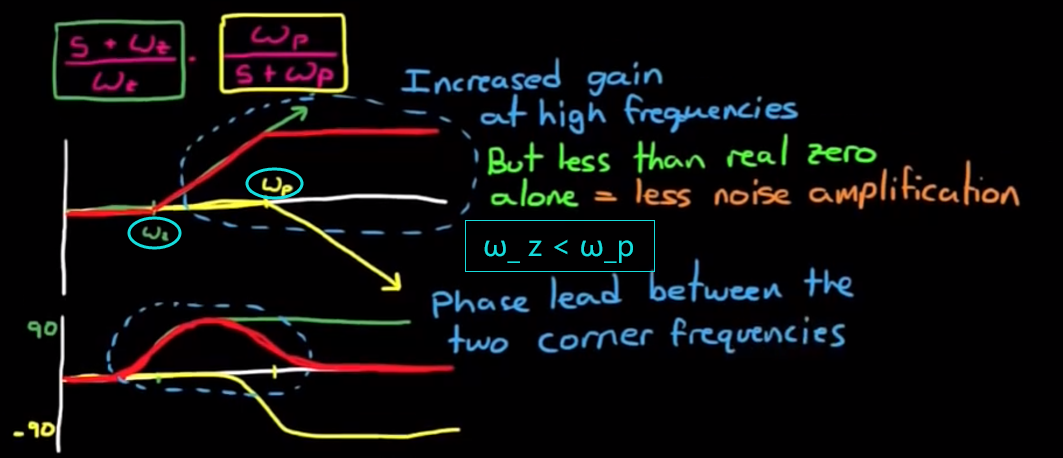
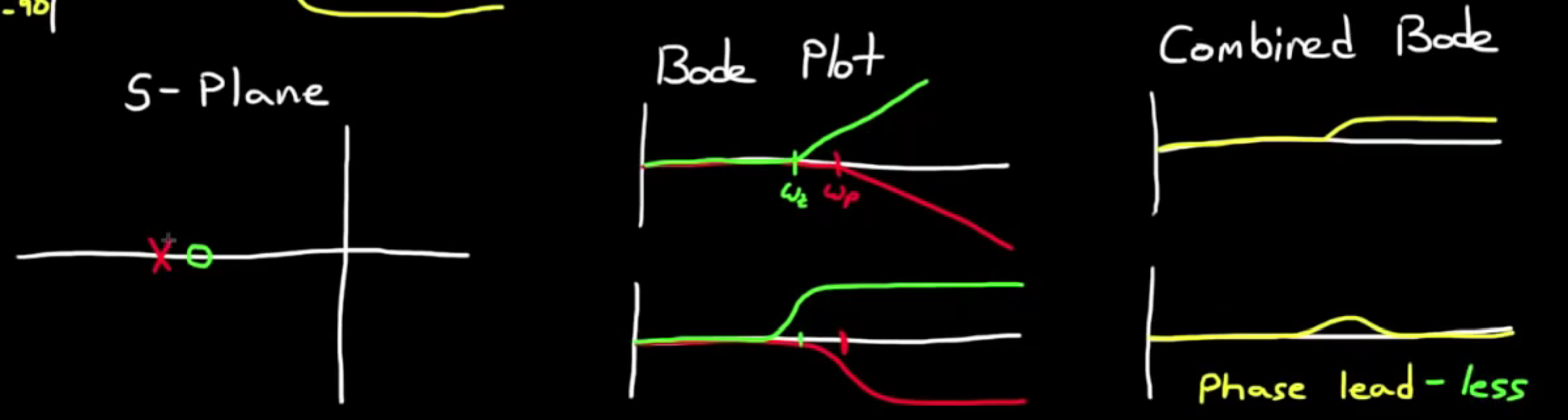
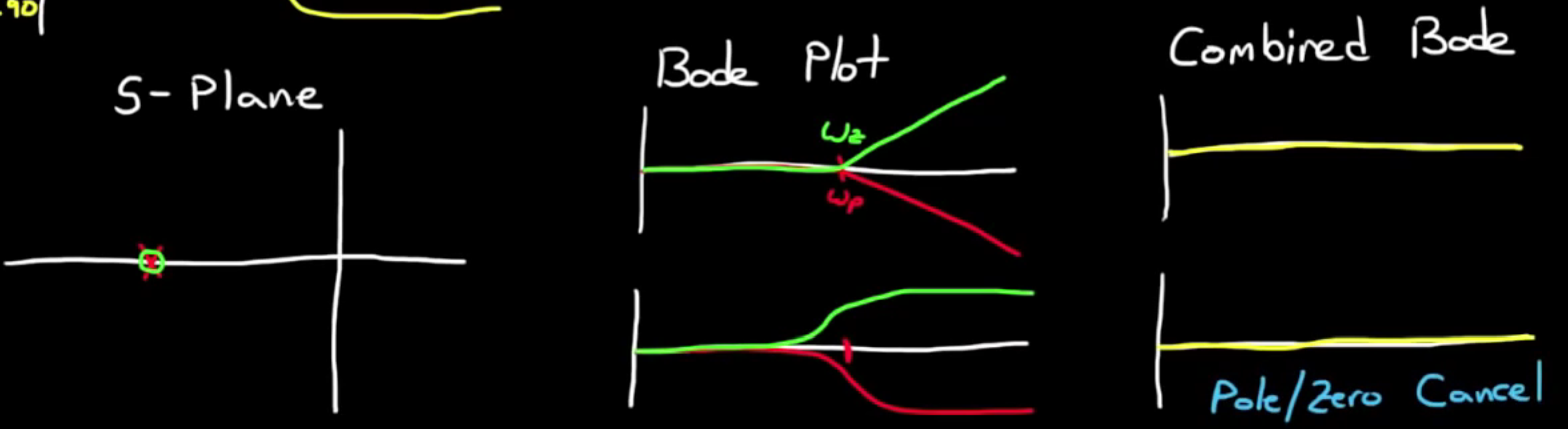
极点和零点的效果有一部分相互抵消, 剩下的效果组成了对某一频域的相位超前滤波器. - 通过移动零点, 使极点距离原点的距离更近, 则相位超前滤波器能逐渐转换为相位滞后滤波器
什么是补偿器?
//下接33集一开头对补偿器和控制器的讨论,
- 作为控制系统工程师, 我们对要控制的系统有一定的性能要求. 当面对一个现实中的系统时, 我们使用一些方法写出了系统的开环传递函数, 通过研究这个传递函数, 我们发现系统并不能性能要求, 于是我们需要考虑加入一个闭环的控制部分, 使系统达到性能要求. 这个闭环控制系统就是补偿器 compensator, 或者也可以称为控制器 controller.
- 我们对系统的需求可以转化为s平面上极点的位置, 当开环系统的极点位置不满足系统需求对应的极点位置, 我们认为开环系统不满足系统需求. 加入合适的补偿器之后, 系统满足性能需求, 即系统的极点被放在了合适的位置上, 由此可见, 补偿器对系统的作用可以解释为以某种方式移动系统极点. 根轨迹的推导就是一个例子, 当对系统进行简单的闭环控制后, 系统极点能沿着根轨迹移动, 本质上是闭环增益移动了极点.
- 补偿器设计步骤:
- 第一步是要对开环系统有充分的认识, 例如使用系统识别方法对一个现实中的控制系统建模, 写出系统函数;
- 第二步是将性能需求转化为极点位置, 并且观察开环系统极点位置与性能需求极点位置的差异, 选择合适的补偿器类型, 例如PID, 超前/滞后补偿器;
- 第三步才是计算补偿器的各个, 并进行验证;
- 如果效果一直不理想, 则可能是补偿器类型没有选对, 需要返回第二步, 考虑换一种补偿器.