- 仍然假设我们拥有正确的开环系统函数, 并且选择了滞后补偿器, 接下来讲解如何放置补偿器的零点和极点.
- 首先要知道我们为什么选择滞后补偿器, 前文中提到超前补偿器能够重塑根轨迹, 增加相位裕度, 滞后滤波器与超前滤波器的作用并不是对偶的关系, 它的主要用途是减小稳态误差, 而且尽量不影响根轨迹.
使用根轨迹
思路
- 与设计超前补偿器时类似, 我们有一对零极点要放置, 优先放置零点, 然后根据一些规则确定极点的位置, 即可完成滞后补偿器的设计.
补充知识: 滞后补偿器如何减小稳态误差?
- 从数学的角度考虑, 画出开环系统 G(s) = G_n(s)/G_d(s) 的闭环控制框图, 我们可以计算出加入滞后补偿器滞后的阶跃输入稳态误差, 如图

最终我们可以将需求的稳态误差带入最下面的等式中, 得出零点与极点的位置关系. 反过来说, 通过设计零点和极点的位置, 我们能够控制稳态误差, 以上就是从数学上进行的证明.
然而值得注意的是, 要想使稳态误差 = 0, z/p -> ∞, 这在现实世界中不可能实现, 所以一般我们只说减小误差, 而不说消除误差. - 从实际作用效果的角度来看, 稳态误差基于系统在低频段的特性, 即s->0时的特性, 那么对比滞后补偿器和超前补偿器:
- 超前补偿器主要是提高高频增益, 从而改善动态响应(例如提升相位裕度), 但是对稳态误差无帮助;
- 滞后补偿器则是提升低频增益, 即除了闭环增益k之外, 还有额外的增益, 鉴于稳态误差的计算规律如下:

可以看到整体增益越大, 稳态误差越小, 所以滞后补偿器具有减小稳态误差的功能.
实例
我们继续对已经设计完成的有超前补偿器的系统进一步设计, 对以下系统, 有稳态误差 = 0.1的需求, 设计一个滞后补偿器


- 首先求零极点位置比例:

- 在哪里放置我们的零点呢? 回忆我们在使用根轨迹设计超前滤波器的时候提到的规律, 一个点α在根轨迹上的条件是:

- 为了尽量不影响根轨迹, 我们需要保证零点和极点与根轨迹上任一一个点的夹角要近似相等. 这样就引出两种可能性, 这对零极点在很偏左的位置或者很偏右的位置.
- 然而将零极点放置在左边的方案, 除非放在无穷远处, 否则位置的比例关系会使得夹角难以相等; 放在右边的方案, 随着极点靠近虚轴, 零点也会很靠近极点, 导致夹角值越来越逼近, 如下图所示:

所以将零点放在距离虚轴很近的地方, 极点紧凑地放在旁边, 是最好的方案. 当然零点也不能离虚轴太近, 因为这样会导致硬件设计成本提高. 按照经验来说, 将零点放在主导极点实坐标的1/50处会比较好.

- 根据1/50这个经验, 我们可以找到零点和极点的位置

- 最后应用我们计算出来的滞后补偿器

在matlab中画出阶跃响应, 可以看到稳态误差明显减小, 保持在0.1左右. 并且脉冲响应没有显著的变化, 因为我们斌没有改变主导极点对系统的影响.

问题: 为什么我把一个极点放在离虚轴很近的地方, 没有改变系统的主导极点?
- 原因之一:偶极子效益
当补偿器的零点和极点非常接近时(即两者在复平面上的距离远小于它们到原点的距离),它们的动态效应会相互抵消 - 原因之二:

主导极点主要决定的是系统的瞬态响应,滞后滤波器影响的是稳态响应,所以即使从位置上看,之后滤波器的极点改变了主导极点,但是实际上并没有太大的影响
使用bode plot
思路
- 用bode plot设计超前滤波器时,我们的思路是尽量影响增益,只影响转折频率附近的相位, 从而增加相位裕度.
- 而使用bode plot设计滞后滤波器时, 因为滞后滤波器只能带来相位滞后即减小, 如果作用在转折频率处, 相位裕度会进一步减小. 我们的思路是通过影响增益从而移动转折频率, 并且让滤波器对相位的影响区域尽量避开移动后的转折频率, 从而提高相位裕度.
实例
老朋友

- 第一步还是满足稳态误差的需求, 和设计超前补偿器时的例子一样, 首先在原点处加一个极点, 是系统变为type 1, 这样就能追踪斜坡响应, 然后设计合适的增益使稳态误差降低到一定的值. 这个过程之前已经说过, 在此略过

- 第二步是画出bode plot观察, 看看我们可以如何移动转折频率

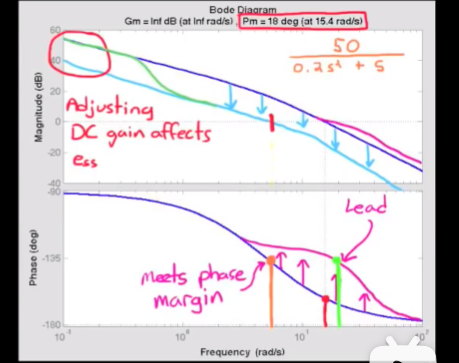
如图, 同时画出了超前补偿器和滞后补偿器增加相位裕度的方法. 我们需要利用滞后补偿器将一定频率范围以后的增益都降低, 起到移动转折频率的的效果. 同时注意不能改变低频部分, 也就是频率接近0的部分, 因为直流增益影响到稳态误差, 如果改变直流增益会使满足稳态误差要求的系统设计失效. - 我们先来认识一下滞后补偿器的bode plot, 以下是一个例子:

有几个关键点:- 可以看到图片右侧的公式中有两种滞后补偿器的写法, 上方的写法是正确的, 因为它保证s->0时增益为1, 而下方的写法虽然直观地表现了零极点的位置, 直流增益却不等于0.
- 看bode plot增益图的整体, s->0, gain = 0dB, s->∞, gain = -6dB, 对高频有衰减的增益; 看相位图的整体, 在s->0, s->∞时, 相位滞后几乎为0, 在频率的中间区域有一段相位滞后.
- 基于这个特性, 我们可以利用高频的增益衰减来移动转折频率, 而几乎不改变相位; 相位滞后的区域尽量远离转折频率放在低频区域, 这是可以接受的.
- 第三步是计算补偿器的增益衰减量, 先假设相位没有任何变化, 在图上找出相位裕度大于48°的点, 再找到对应增益图中的点位, 比较一下就知道理论上要多少增益衰减.

但是由于实际上相位会有一定滞后, 也就是说按照理想方案设计, 最后相位裕度会刚好不够一点, 所以在设计补偿器的时候留一些余量, 例如理想方案增益为-18dB, 实际设计-20dB的增益. - 第四步是计算零极点的位置. 首先根据目标增益-20dB, 得到实际增益是1/10, 1dB = 20log(输出/输入). 也就是说滞后补偿器按照以下表示方法:

s的系数会有10倍的关系, 也就是零点的实坐标是极点的实坐标的10倍.
接下来摆放零点. 由于现实因素限制, 还是将零点放在主导极点实坐标的1/50处, 然后放置极点, 就完成了滞后补偿器的设计.

- 在matlab中画出原闭环系统, 加入超前补偿器的系统, 加入滞后补偿器的系统三个bode plot并合并, 看看效果

闭环系统阶跃响应如图

补充知识: 超前与滞后补偿器对系统响应速度的影响
- 一般来说, 超前补偿器加快系统响应, 滞后补偿器减慢系统响应, 因为超前补偿器使转折频率提高, 滞后补偿器使转折频率降低, 而二阶系统中上升时间与转折频率有以下关系:

阻尼比一定时, 转折频率高的上升时间短. 故得此结论
补充知识: 为什么有时我们要让系统响应慢下来?
- 不需要一个对指令快速响应或者不进行高频控制时, 减慢一个系统的响应可以减低它对高频噪音的响应, 减小它的整体输出噪音;
- 如果输入中或者系统扰动中存在不确定的高频模态, 那么这些扰动不会对一个慢下来的系统造成很多影响